Про датчик движения и подключение его к Arduino
Опубликовано: 25.10.2016 19:00
Автор: jazon
Всем привет, сегодня мы рассмотрим устройство под названием датчик движения. Многие из нас слышали об этой штуке, кто то даже имел дело с этим устройством. Что же такое датчик движения? Попробуем разобраться, итак:
Датчик движения, или датчик перемещения - устройство (прибор) обнаруживающий перемещение каких либо объектов. Очень часто эти устройства, используются в системах охраны, сигнализации и мониторинга. Форм факторов этих датчиков существует великое множество, но мы рассмотрим именно модуль датчика движения для подключения к платам Arduino, и именно от фирмы RobotDyn. Почему именно этой фирмы? Я не хочу заниматься рекламой этого магазина и его продукции, но именно продукция данного магазина была выбрана в качестве лабораторных образцов благодаря качественной подаче своих изделий для конечного потребителя. Итак, встречаем - датчик движения(PIR Sensor) от фирмы RobotDyn:
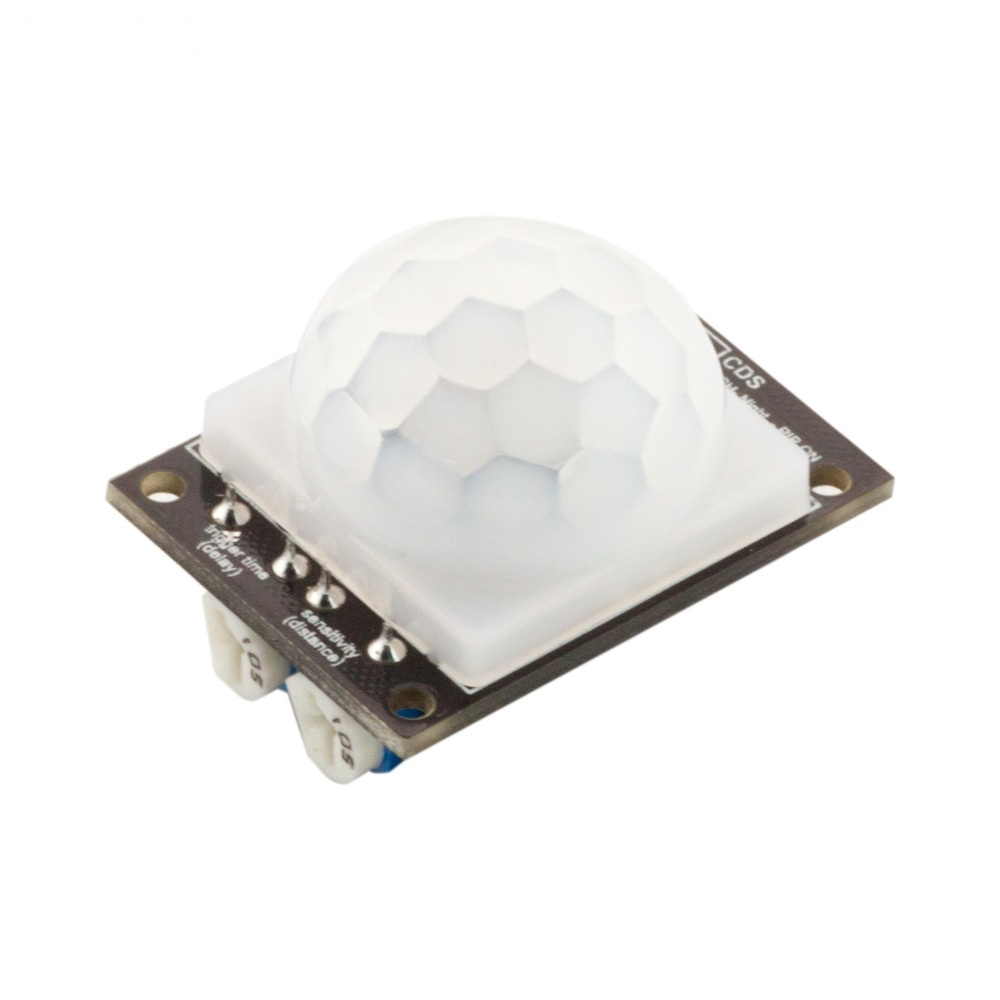

Эти датчики малы по габаритам, потребляют мало энергии и просты в использовании. Кроме того - датчики движения фирмы RobotDyn имеют еще и маркированные шелкографией контакты, это конечно мелочь, но очень приятная. Ну а тем кто использует такие же датчики, но только других фирм, не стоит беспокоиться - все они имеют одинаковый функционал, и даже если не промаркированы контакты, то цоколёвку таких датчиков легко найти в интернете.
Основные технические характеристики датчика движения(PIR Sensor):
Зона работы датчика: от 3 до 7 метров
Угол слежения: до 110о
Рабочее напряжение: 4,5...6 Вольт
Потребляемый ток: до 50мкА
Примечание: Стандартный функционал датчика можно расширить, подключив на пины IN и GND датчик освещенности, и тогда датчик движения будет срабатывать только в темноте.
Инициализация устройства.
При включении, датчику требуется почти минута для инициализации. В течение этого периода, датчик может давать ложные сигналы, это следует учесть при программировании микроконтроллера с подключенным к нему датчиком, или в цепях исполнительных устройств, если подключение производится без использования микроконтроллера.
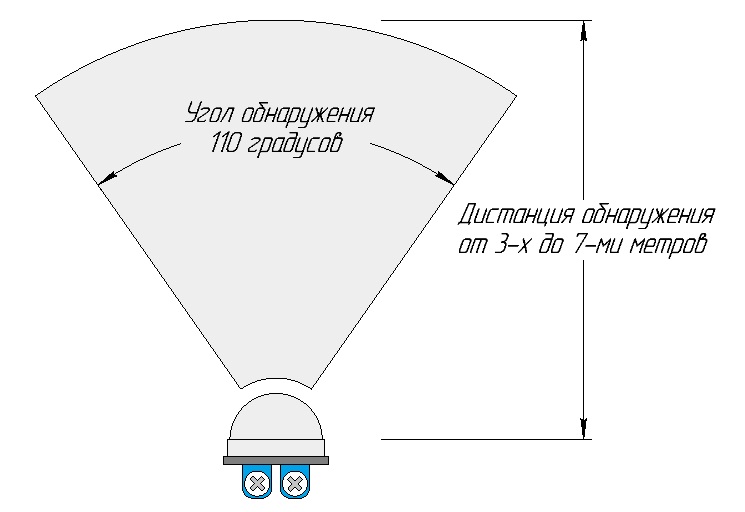
Угол и область обнаружения.
Угол обнаружения(слежения) составляет 110 градусов, диапазон расстояния обнаружения от 3 до 7 метров, иллюстрация ниже показывает всё это:
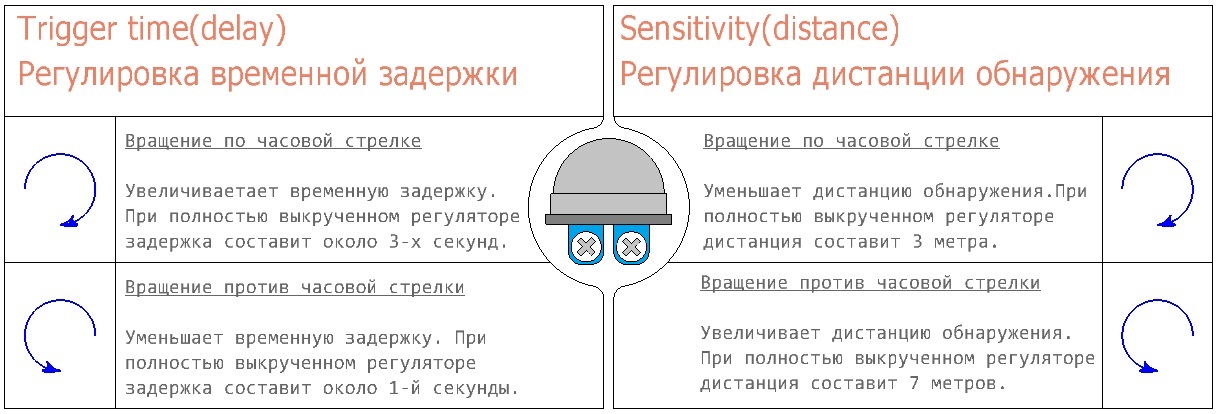
Регулировка чувствительности(дистанции обнаружения) и временной задержки.
На приведённой ниже таблице показаны основные регулировки датчика движения, слева находится регулятор временной задержки соответственно в левом столбце приведено описание возможных настроек. В правом столбце описание регулировок расстояния обнаружения.
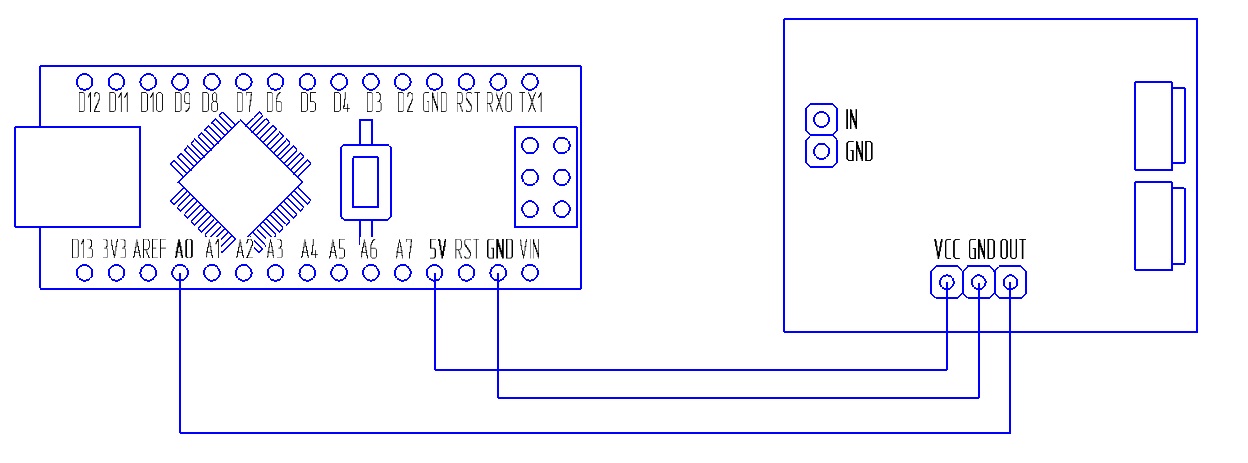
Подключение датчика:
- PIR Sensor[PIN GND] - Arduino Nano[PIN GND]
- PIR Sensor[PIN 5V] - Arduino Nano[PIN 5V]
- PIR Sensor[PIN OUT] - Arduino Nano[PIN A0]
- PIR Sensor[PIN IN] - для датчика освещенности
- PIR Sensor[PIN GND] - для датчика освещенности
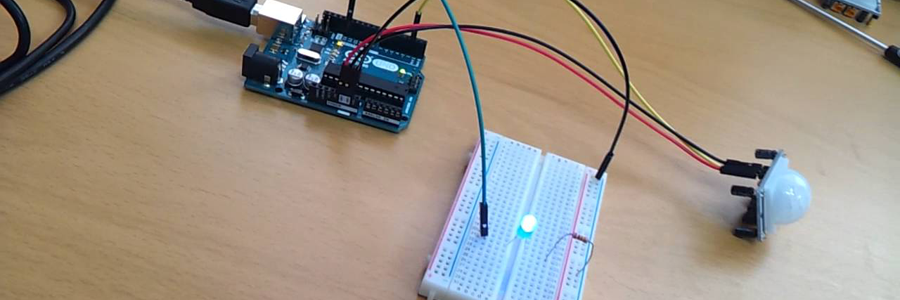
Типичная схема подключения дана на схеме ниже, в нашем случае датчик показан условно с тыльной стороны и подключен к плате Arduino Nano.
Скетч демонстрирующий работу датчика движения(используем программу Serial Monitor Pro):
/*
* PIR Sensor[PIN GND] -> Arduino Nano[PIN GND]
* PIR Sensor[PIN 5V] -> Arduino Nano[PIN 5V]
* PIR Sensor[PIN OUT] -> Arduino Nano[PIN A0]
*/
void setup()
{
//Установить соединение с монитором порта
Serial.begin(9600);
}
void loop()
{
//Считываем пороговое значение с порта А0
//обычно оно выше 500 если есть сигнал
if(analogRead(A0) > 500)
{
//Сигнал с датчика движения
Serial.println("Есть движение !!!");
}
else
{
//Нет сигнала
Serial.println("Всё тихо...");
}
}Скетч является обычной проверкой работы датчика движения, в нём есть много недостатков, таких как:
- Возможные ложные срабатывания, датчику необходима самоинициализация в течение одной минуты.
- Жесткая привязка к монитору порта, нет выходных исполнительных устройств(реле, сирена, светоиндикация)
- Слишком короткое время сигнала на выходе датчика, при обнаружении движения необходимо программно задержать сигнал на более долгий период времени.
Усложнив схему и расширив функционал датчика, можно избежать вышеописанных недостатков. Для этого потребуется дополнить схему модулем реле и подключить обычную лампу на 220 вольт через данный модуль. Сам же модуль реле будет подключен к пину 3 на плате Arduino Nano. Итак принципиальная схема:
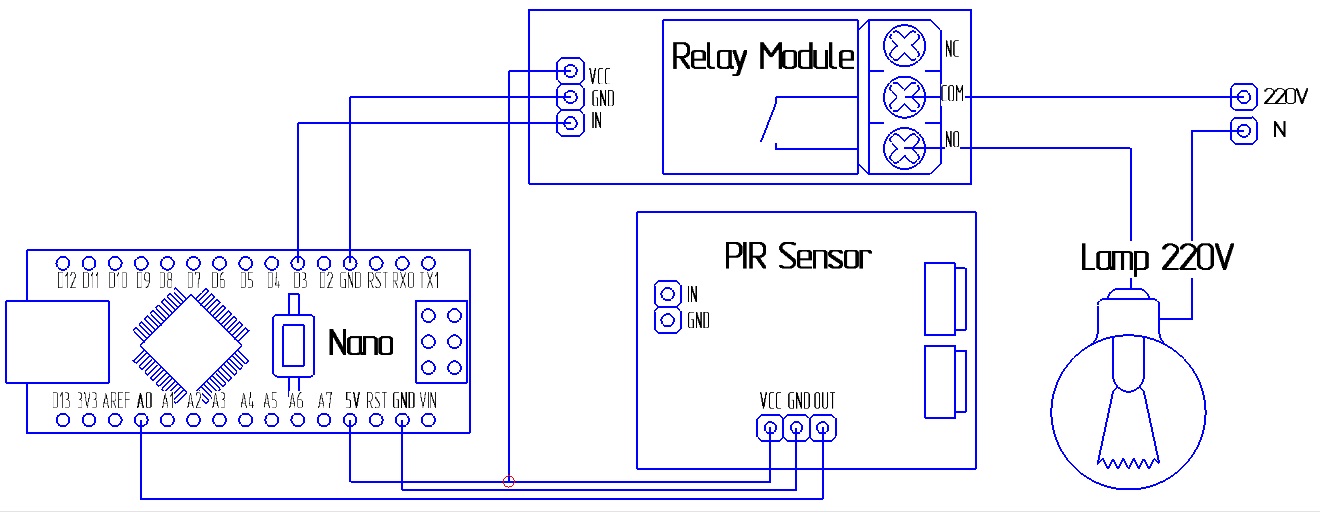
Теперь пришло время немного усовершенствовать скетч, которым проверялся датчик движения. Именно в скетче, будет реализована задержка выключения реле, так как сам датчик движения имеет слишком короткое время сигнала на выходе при срабатывании. Программа реализует 10-ти секундную задержку при срабатывании датчика. При желании это время можно увеличить или уменьшить, изменив значение переменной DelayValue . Ниже представлен скетч и видео работы всей собранной схемы:
/*
* PIR Sensor[PIN GND] -> Arduino Nano[PIN GND]
* PIR Sensor[PIN 5V] -> Arduino Nano[PIN 5V]
* PIR Sensor[PIN OUT] -> Arduino Nano[PIN A0]
* Relay Module[PIN IN] -> Arduino Nano[PIN 3]
*/
//relout - пин(выходной сигнал) для модуля реле
const int relout = 3;
//prevMillis - переменная для хранения времени предидущего цикла сканирования программы
//interval - временной интервал для отсчета секунд до выключения реле
unsigned long prevMillis = 0;
int interval = 1000;
//DelayValue - период в течение которого реле удерживается во включенном состоянии
int DelayValue = 10;
//initSecond - Переменная итерации цикла инициализации
int initSecond = 60;
//countDelayOff - счетчик временных интервалов
static int countDelayOff = 0;
//trigger - флаг срабатывания датчика движения
static bool trigger = false;
void setup()
{
//Стандартная процедура инициализации порта на который подключен модуль реле
//ВАЖНО!!! - чтобы модуль реле оставался в первоначально выключенном состоянии
//и не срабатывал при инициализации, нужно записать в порт входа/выхода
//значение HIGH, это позволит избежать ложных "перещелкиваний", и сохранит
//состояние реле таким, каким оно было до включения всей схемы в работу
pinMode(relout, OUTPUT);
digitalWrite(relout, HIGH);
//Здесь всё просто - ждем когда закончатся 60 циклов(переменная initSecond)
//продолжительностью в 1 секунду, за это время датчик "самоинициализируется"
for(int i = 0; i < initSecond; i ++)
{
delay(1000);
}
}
void loop()
{
//Считать значение с аналогового порта А0
//Если значение выше 500
if(analogRead(A0) > 500)
{
//Установить флаг срабатывания датчика движения
if(!trigger)
{
trigger = true;
}
}
//Пока флаг срабатывания датчика движения установлен
while(trigger)
{
//Выполнять следующие инструкции
//Сохранить в переменной currMillis
//значение миллисекунд прошедших с момента начала
//выполнения программы
unsigned long currMillis = millis();
//Сравниваем с предидущим значением миллисекунд
//если разница больше заданного интервала, то:
if(currMillis - prevMillis > interval)
{
//Сохранить текущее значение миллисекунд в переменную prevMillis
prevMillis = currMillis;
//Проверяем счетчик задержки сравнивая его со значением периода
//в течение которого реле должно удерживаться во включенном
//состоянии
if(countDelayOff >= DelayValue)
{
//Если значение сравнялось, то:
//сбросить флаг срабатывания датчика движения
trigger = false;
//Обнулить счетчик задержки
countDelayOff = 0;
//Выключить реле
digitalWrite(relout, HIGH);
//Прервать цикл
break;
}
else
{
//Если значение всё еще меньше, то
//Инкрементировать счетчик задержки на единицу
countDelayOff ++;
//Удерживать реле во включенном состоянии
digitalWrite(relout, LOW);
}
}
}
}В программе присутствует конструкция:
unsigned long prevMillis = 0;
int interval = 1000;
...
unsigned long currMillis = millis();
if(currMillis - prevMillis > interval)
{
prevMillis = currMillis;
....
// Наши операции заключенные в тело конструкции
....
}
Чтобы внести ясность, было решено отдельно прокомментировать эту конструкцию. Итак, данная конструкция позволяет выполнить как бы параллельную задачу в программе. Тело конструкции срабатывает примерно раз в секунду, этому способствует переменная interval. Сначала, переменной currMillis присваивается значение возвращаемое при вызове функции millis(). Функция millis() возвращает количество миллисекунд прошедших с начала программы. Если разница currMillis - prevMillis больше чем значение переменной interval то это означает, что уже прошло более секунды с начала выполнения программы, и нужно сохранить значение переменной currMillis в переменную prevMillis затем выполнить операции заключенные в теле конструкции. Если же разница currMillis - prevMillis меньше чем значение переменной interval, то между циклами сканирования программы еще не прошло секунды, и операции заключенные в теле конструкции пропускаются.
Ну и в завершение статьи видео от автора:
Наши рубрики
Модули
Библиотеки
Авторские статьи
Уроки
Мои поделки
Лучшие проекты на Arduino
Обзоры
Моддинг
Переводы
Расскажи о нас
Сообщение
Если у Вас есть опыт в работе с Arduino и собственно есть время для творчества, мы приглашаем всех желающих стать авторами статей публикуемых на нашем портале. Это могут быть как уроки, так и рассказы о ваших экспериментах с Arduino. Описание различных датчиков и модулей. Советы и наставления начинающим. Пишите и размещайте свои статьи в соответсвующей ветке форума.