Видеоуроки по Arduino #5: Моторы и транзисторы (Jeremy Blum)
Опубликовано: 19.10.2016 20:03
Автор: genaonyx
Введение
В данном вводном видео уроке Джереми Блум расскажет Вам:
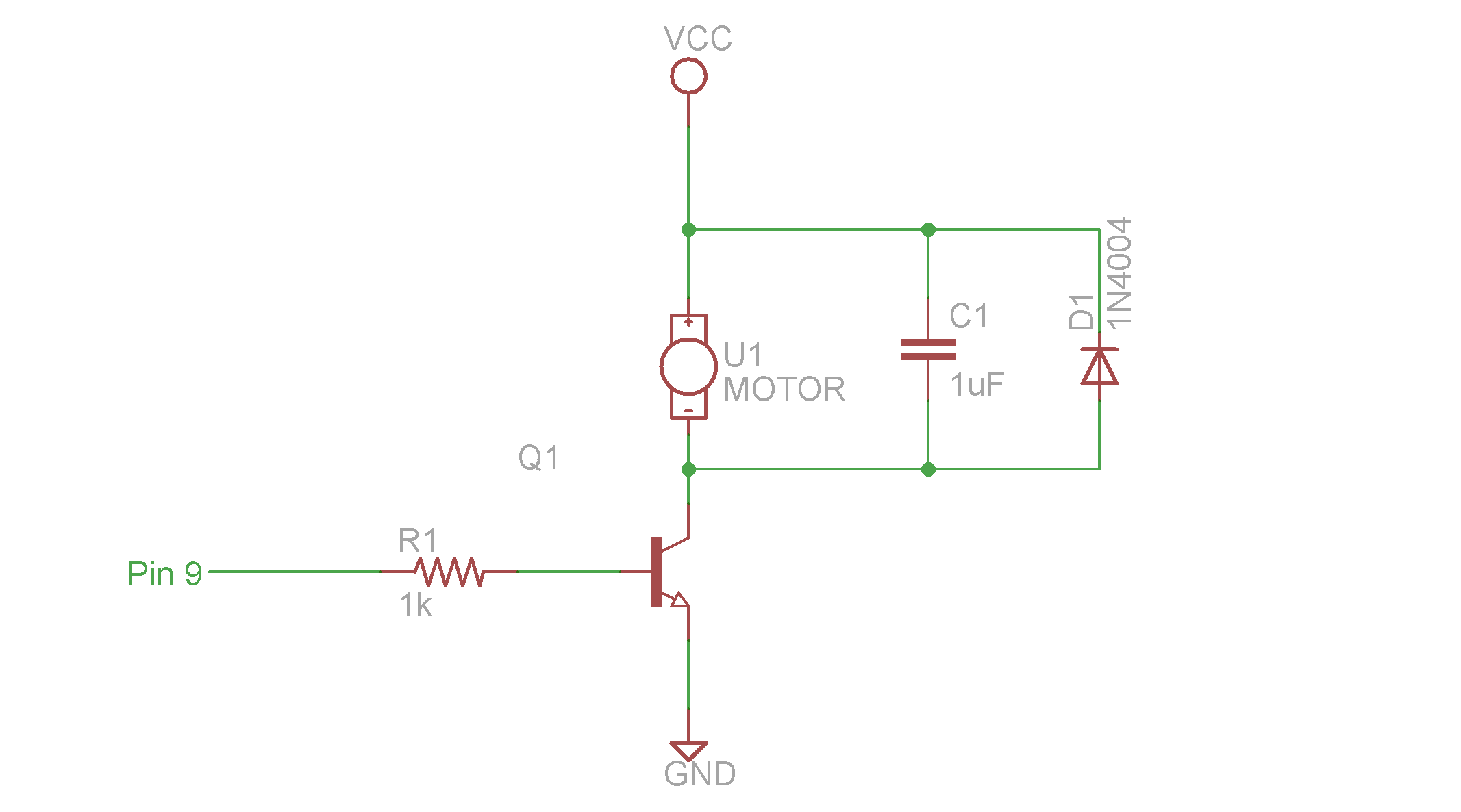
- Как подключить и управлять мотором постоянного тока.
- Как использовать биполярный транзистор для управления мотором.
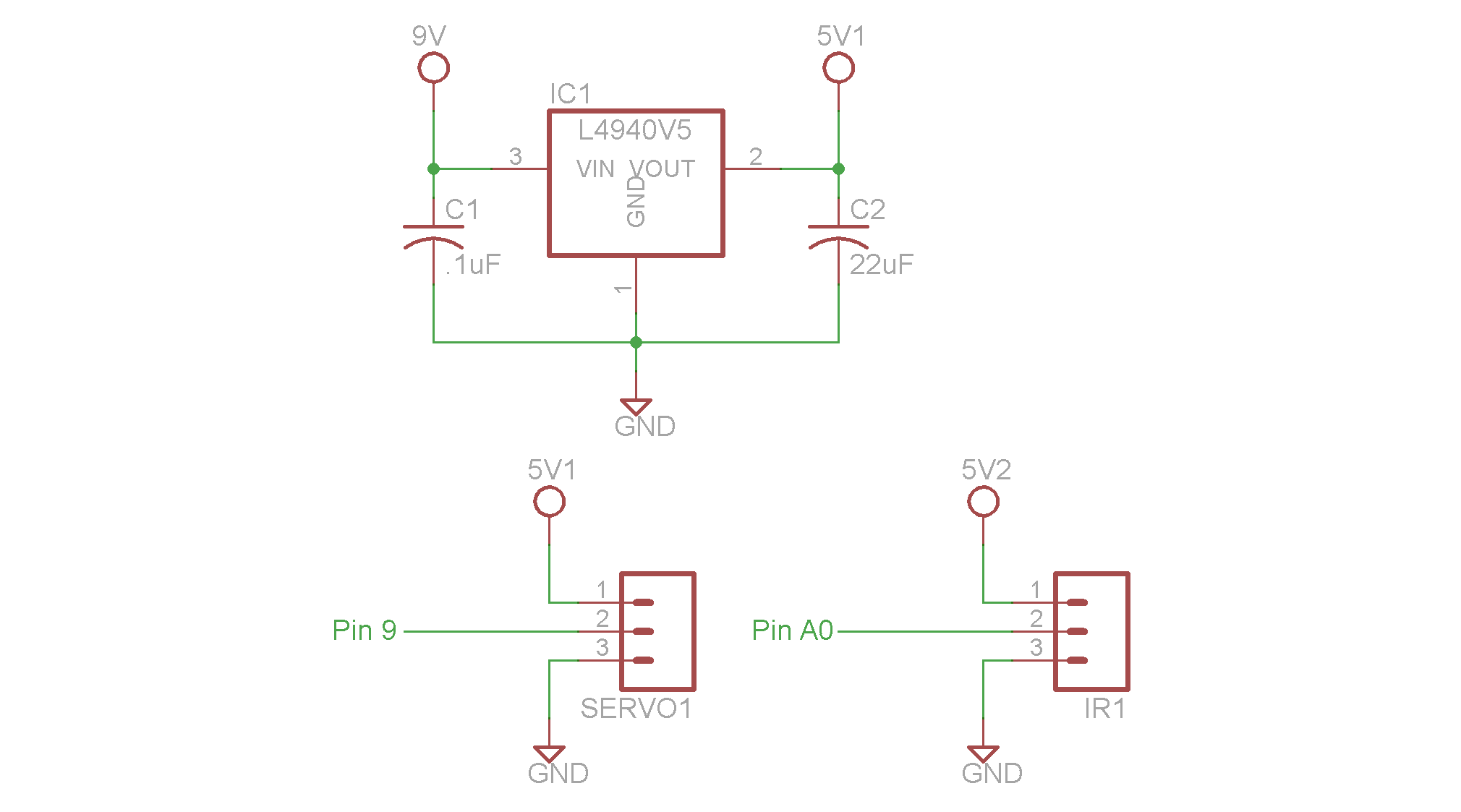
- Как подключить и управлять сервоприводом и ИК - дальномером.
- Вкратце о библиотеке Servo.
- И многое другое.
Приятного просмотра!
Понадобиться
- Arduino UNO
- Кабель USB-AB
- Breadboard (Доска для прототипирования)
- Двигатель постоянного тока
- Сервопривод
- Диод (1N4004)
- Резистор 1 кОм
- Конденсатор 0.1 мкФ
- Конденсатор 1 мкФ
- Конденсатор 22 мкФ
- Биполярный транзистор (npn)
- Батарея "Крона"
- ИК - дальномер
- Стабилизатор напряжения 5В (l4940v5)
Видеоурок
Схемы
Скетч №1
// Объявляем порт
int motorPin = 9;
void setup()
{
// Настраиваем порт мотора как выход
pinMode(motorPin, OUTPUT);
}
void loop()
{
// Увеличиваем скорость мотора от 0 до 255
for (int i=0; i<=255; i++)
{
analogWrite(motorPin, i);
delay(10);
}
delay(500); // Держим скорость
// Снижаем скорость с 255 до 0
for(int i=255; i>=0; i--)
{
analogWrite(motorPin, i);
delay(10);
}
delay(500); // Держим
}
Скетч №2
// Подключаем библиотеку Servo
#include "Servo.h"
// Объявляем порт
int servoPin = 9;
// Создаем объект Servo
Servo jeremysServo;
void setup()
{
// Связываем сервопривод с портом
jeremysServo.attach(servoPin);
}
void loop()
{
// Поворот сервопривода на 20° каждую секунду
for (int i = 0; i <=180; i=i+20)
{
jeremysServo.write(i);
delay(1000);
}
}
Скетч №3
// Подключаем библиотеку Servo
#include "Servo.h"
// Объявляем порты
int servoPin = 9;
int distPin = 0;
// Создаем объект Servo
Servo jeremysServo;
void setup()
{
// Связываем сервопривод с портом
jeremysServo.attach(servoPin);
}
void loop()
{
// Чтение дистанции с ИК - дальномера и пересчет
int dist = analogRead(distPin);
int pos = map(dist, 0, 1023, 0, 180);
// Поворачиваем сервопривод
jeremysServo.write(pos);
}
Наши рубрики
Модули
Библиотеки
Авторские статьи
Уроки
Мои поделки
Лучшие проекты на Arduino
Обзоры
Моддинг
Переводы
Расскажи о нас
Сообщение
Если у Вас есть опыт в работе с Arduino и собственно есть время для творчества, мы приглашаем всех желающих стать авторами статей публикуемых на нашем портале. Это могут быть как уроки, так и рассказы о ваших экспериментах с Arduino. Описание различных датчиков и модулей. Советы и наставления начинающим. Пишите и размещайте свои статьи в соответсвующей ветке форума.